


ក្នុងរយៈពេលប៉ុន្មានឆ្នាំចុងក្រោយនេះ ជាមួយនឹងប្រជាប្រិយភាពជាបន្តបន្ទាប់នៃអ៊ីនធឺណែត ពាណិជ្ជកម្មអេឡិចត្រូនិកបានអភិវឌ្ឍយ៉ាងឆាប់រហ័ស។ ទំនិញបញ្ជាទិញរបស់អតិថិជនបង្ហាញពីលក្ខណៈនៃពូជជាច្រើន បាច់ពីរបី និងរយៈពេលដឹកជញ្ជូនខ្លី ដែលធ្វើឱ្យដង់ស៊ីតេនៃការផ្ទុករបស់ធ្នើនៅក្នុងមជ្ឈមណ្ឌលចែកចាយភ័ស្តុភាររបស់អ្នកផ្គត់ផ្គង់មានភាពប្រសើរឡើងជាបន្តបន្ទាប់។ ភាពញឹកញាប់នៃសម្ភារៈចូល និងចេញពីឃ្លាំងកំពុងកើនឡើង។ ចំនួននៃការរើសផ្នែកតូចៗកំពុងកើនឡើងពីមួយថ្ងៃទៅមួយថ្ងៃ។ មជ្ឈមណ្ឌលចែកចាយភស្តុភារកាន់តែច្រើនឡើងៗ ប្រើប្រាស់ទំនិញតាមរថយន្តដឹកជញ្ជូនទៅកាន់ប្រព័ន្ធជ្រើសរើសមនុស្ស។
HEGERLS (Hebei Walker Metal Products Co., Ltd.
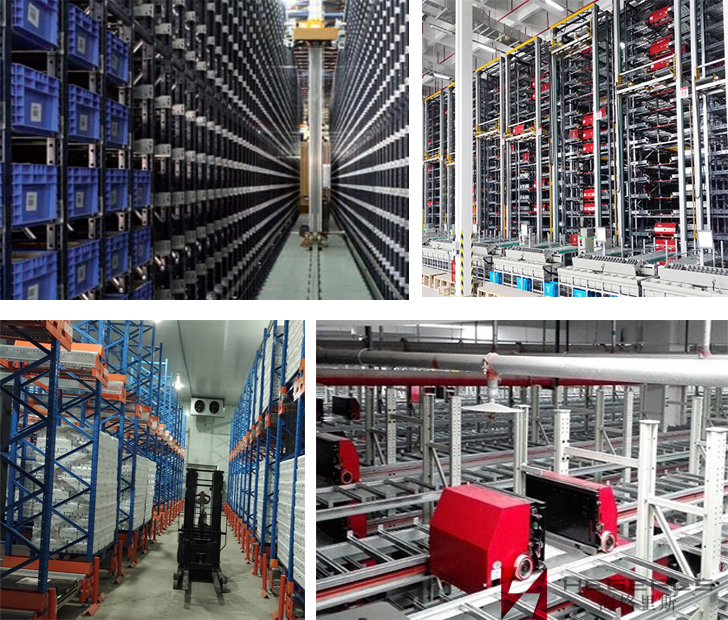
ដង្កៀបកែវពង្រីកត្រូវបានគេប្រើយ៉ាងទូលំទូលាយនៅក្នុងឧបករណ៍ផ្ទុកដោយស្វ័យប្រវត្តិដូចជា ឃ្លាំងស្តេរ៉េអូ ឡានដឹកទំនិញពហុស្រទាប់ ធុងដាក់ប្រភេទ AGV, RGV និងការផ្ទុកខ្នាតតូច។ ទំងន់អតិបរមានៃប្រអប់សម្ភារៈដែលផ្ទុកដោយ HEGERLS អាចឡើងដល់ 50Kg ។ ទទឹងនៃការគៀបនៃដៃសមអាចត្រូវបានលៃតម្រូវតាមអំពើចិត្តក្នុងចន្លោះពី 200 ~ 600mm ។ ការធ្វើដំណើរជ្រើសរើសអតិបរមាគឺ 840mm ។ ល្បឿនប្រតិបត្តិការអតិបរមានៃសមកែវកែវពង្រីកគឺ 1.5m/s ហើយការបង្កើនល្បឿនគឺ 1.2m/s ²។ សំលេងរំខានប្រតិបត្តិការត្រូវបានគ្រប់គ្រងក្នុងរង្វង់ 75dB ដែលអាចបំពេញតាមតម្រូវការនៃ racks ផ្នែកបន្ថែមតែមួយ និងពីរដង។ HEGERLS ក៏អាចប្ដូរតាមបំណងនូវឃ្លាំងស្តេរ៉េអូស្កូបក្នុងរថយន្តពហុស្រទាប់នៃប្រអប់ប្រដាប់កែវពង្រីកដែលកាន់តាមតម្រូវការជាក់លាក់របស់អតិថិជន ដូចជាទទឹងចាប់ ការជ្រើសរើសដាច់សរសៃឈាមខួរក្បាល និងប៉ារ៉ាម៉ែត្រផ្សេងទៀត។
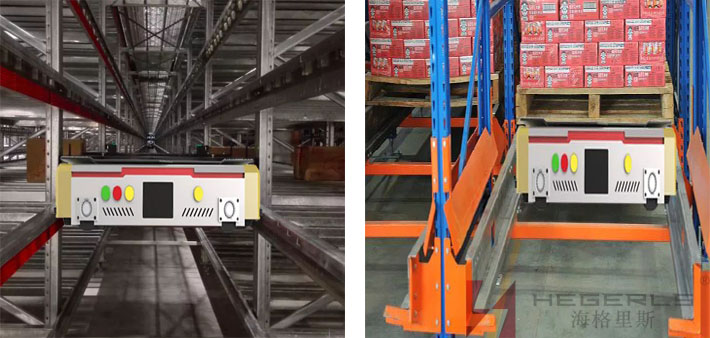
គ្រឿងបន្លាស់នៅក្នុងប្រអប់ ស្តេរ៉េអូ ស្តេរ៉េអូ ស្តេរ៉េអូ ស្តេរ៉េអូ ស្តេរ៉េអូ ស្តេរ៉េអូ ស្តេរ៉េអូ ស្តេរ៉េអូ ជាយន្តការកែវពង្រីក ដែលប្រើនៅក្នុងឃ្លាំងស្តេរ៉េអូ និងប្រព័ន្ធផ្ទុកស្វ័យប្រវត្តិ សម្រាប់រក្សាទុក ឬផ្ទេរសម្ភារៈ។ វាមានមុខងារពង្រីកស្វ័យប្រវត្តិពីរផ្លូវដែលអាចបត់បែនបាន និងមុខងារកំណត់ត្រឹមត្រូវ! វាអាចត្រូវបានម៉ោនដោយផ្ទាល់នៅលើជង់ឬម៉ោននៅលើយន្តការលើកថេរឬម៉ោននៅលើវេទិកាលើកចល័ត។ អ្នកជង់រត់កាត់ផ្លូវរវាងធ្នើរ ដើម្បីចូល ឬផ្ទេររបស់របរដោយស្វ័យប្រវត្តិ! វាអាចភ្ជាប់ជាមួយប្រព័ន្ធខ្សែសង្វាក់ផលិតកម្ម និងប្រព័ន្ធគ្រប់គ្រងសហគ្រាស។ វាប្រើបច្ចេកវិទ្យាកុំព្យូទ័រ និងបាកូដ (អ៊ិនកូដឌ័រ) ដើម្បីដឹងពីការគ្រប់គ្រង និងប្រតិបត្តិការឆ្លាតវៃព័ត៌មាន!

អំពី HEGERLS Clamping Telescopic Fork
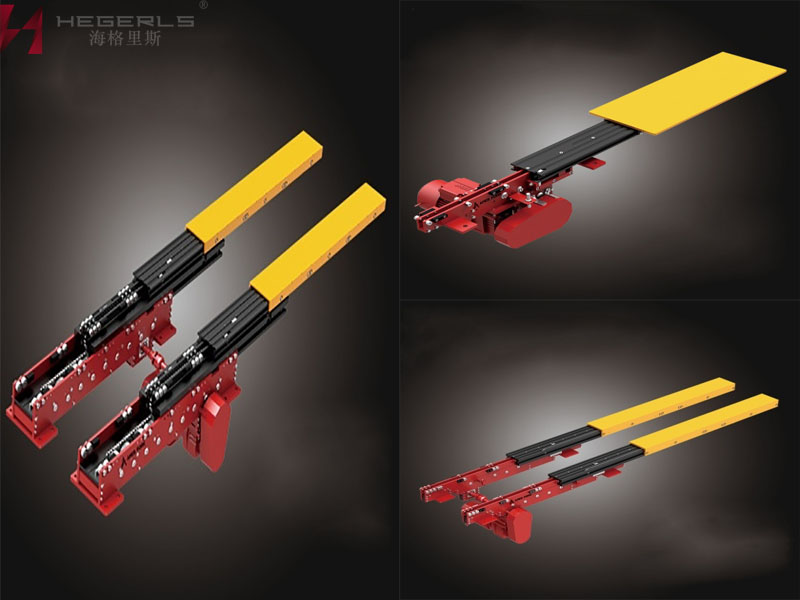
HEGERLS fork telescopic gripper fork គឺជាប្រភេទ fork តែមួយគត់នៅក្នុងស៊េរីនៃ fork telescopic នៃ stackers ពោលគឺ fork fork telescopic automatic two-way ដែលគេស្គាល់ផងដែរថាជា fork កាន់ gripper ឬ fork gripper fork, fork fork ឬ fork fork . វាជាសមដែលប្រើជាពិសេសសម្រាប់ផ្ទេរធុងតូចៗ។ វាអាចត្រូវបានផ្គុំដោយផ្ទាល់នៅលើពហុជាន់ជ្រើសរើស AGV ឬវេទិកាការងារផ្សេងទៀតជាមួយនឹងការពង្រីកដៃសមនិងក្ដាប់នៃដងថ្លឹង (ទំពក់) បញ្ចប់ការចូលដំណើរការឬសកម្មភាពផ្ទេរ!
បន្ទះក្តាប់ HEGERLS ភាគច្រើនផលិតពីលោហធាតុអាលុយមីញ៉ូម ដែលមានទំហំតូច ទម្ងន់ស្រាល ល្បឿនរត់លឿន និងការពង្រីកដោយរលូន។ ក្នុងពេលជាមួយគ្នានេះ វាក៏បានប្រកាន់យកគោលការណ៍នៃការធ្វើសមកាលកម្មម៉ូទ័រច្រើនផងដែរ ដោយដឹងថា យន្តការ fork telescopic ដូចគ្នាអាចត្រូវបានប្រើដើម្បីផ្ទេរ ឬចូលប្រើប្រអប់ដែលមានលក្ខណៈពិសេសផ្សេងៗគ្នា។ វាមិនត្រឹមតែធ្វើអោយប្រសើរឡើងនូវប្រសិទ្ធភាពនៃការផ្ទុកនោះទេ ប៉ុន្តែថែមទាំងធ្វើអោយប្រសើរឡើងយ៉ាងខ្លាំងនូវអត្រានៃការប្រើប្រាស់លំហរនៃកន្លែងផ្ទុក ជាពិសេសសម្រាប់ឃ្លាំងឆ្លាតវៃដែលមានកម្រិតខ្ពស់!
ឈុត HEGERLS លើរចនាសម្ព័ន្ធសមកែវកែវពង្រីក
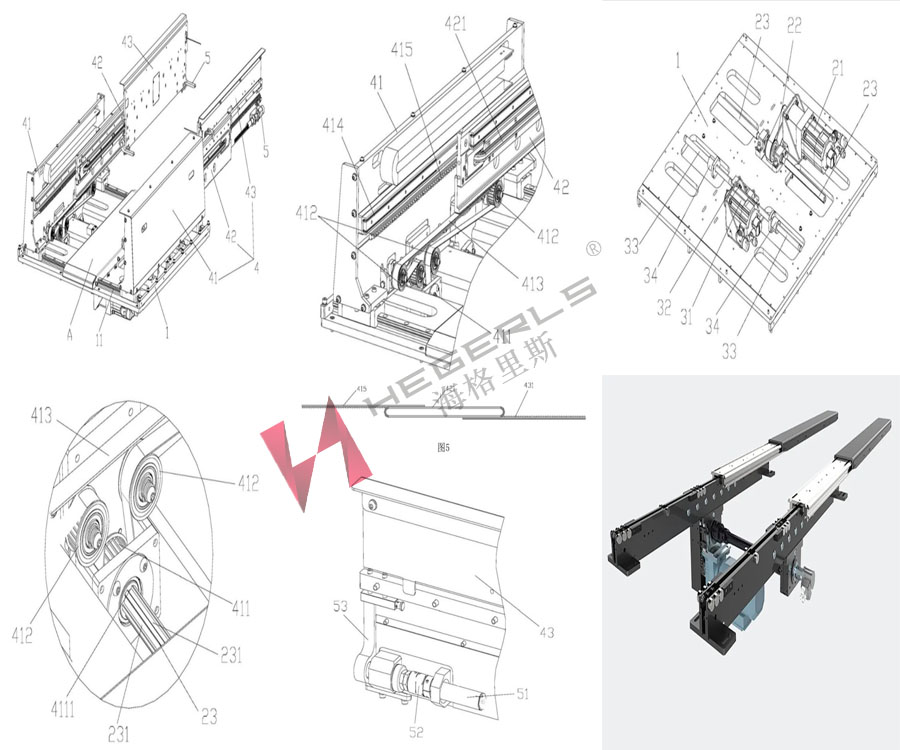
រចនាសម្ព័ន្ធរបស់ HEGERLS gripper fork អាចបែងចែកទៅជាទីតាំងផ្ទុកជ្រៅ និងទីតាំងផ្ទុករាក់។ ទីតាំងផ្ទុកជ្រៅ គឺជាទីតាំងផ្ទុកដែលមានប្រអប់សម្ភារៈពីរ ហើយទីតាំងស្តុកទឹករាក់ គឺជាទីតាំងផ្ទុកដែលមានប្រអប់សម្ភារៈមួយ។ នោះគឺ ទីតាំងផ្ទុកជ្រៅអាចតោងប្រអប់សម្ភារៈពីរក្នុងពេលតែមួយ ខណៈទីតាំងស្តុកទឹករាក់អាចតោងតែប្រអប់សម្ភារៈមួយក្នុងពេលតែមួយ។ ភាពខុសប្លែកគ្នារវាងសមបត់ដៃរបស់ HEGERLS និងសមបត់កែវពង្រីកធម្មតាគឺថា សមសម្រាប់ទាញម្រាមដៃនៅតែមានតួសមចំនួនបីគឺ តួសមខាងក្នុង តួសមកណ្តាល និងតួសមខាងក្រៅ លើកលែងតែតួសមខាងមុខ។ មានដំបងទាញមួយបន្ថែមទៀត (ទំពក់) ដែលត្រូវបានផ្គូផ្គងជាមួយផ្លូវដែកមគ្គុទ្ទេសក៍ (ផ្លូវដែករុញ) របាររំកិល កង់ធ្វើសមកាលកម្ម ខ្សែក្រវ៉ាត់ធ្វើសមកាលកម្ម របារស្ទាត់ជំនាញ ដំបងប្តូរ (ទំពក់) ចង្កឹះ រនាំងកង់ ម៉ូទ័រដ្រាយ (សឺវ៉ូ) , shift rod motor ឧបករណ៍រាវរក និងធាតុផ្សំផ្សេងទៀតបង្កើតបានជាយន្តការកែវពង្រីកពេញលេញ ដែលសហការជាមួយដៃ fork កែវពង្រីក និងក្ដាប់នៃដងថ្លឹង (ទំពក់) ដើម្បីបញ្ចប់សកម្មភាពចូល ឬផ្ទេរ!
គោលការណ៍ការងាររបស់ឈុត HEGERLS នៅលើសមកែវកែវពង្រីក
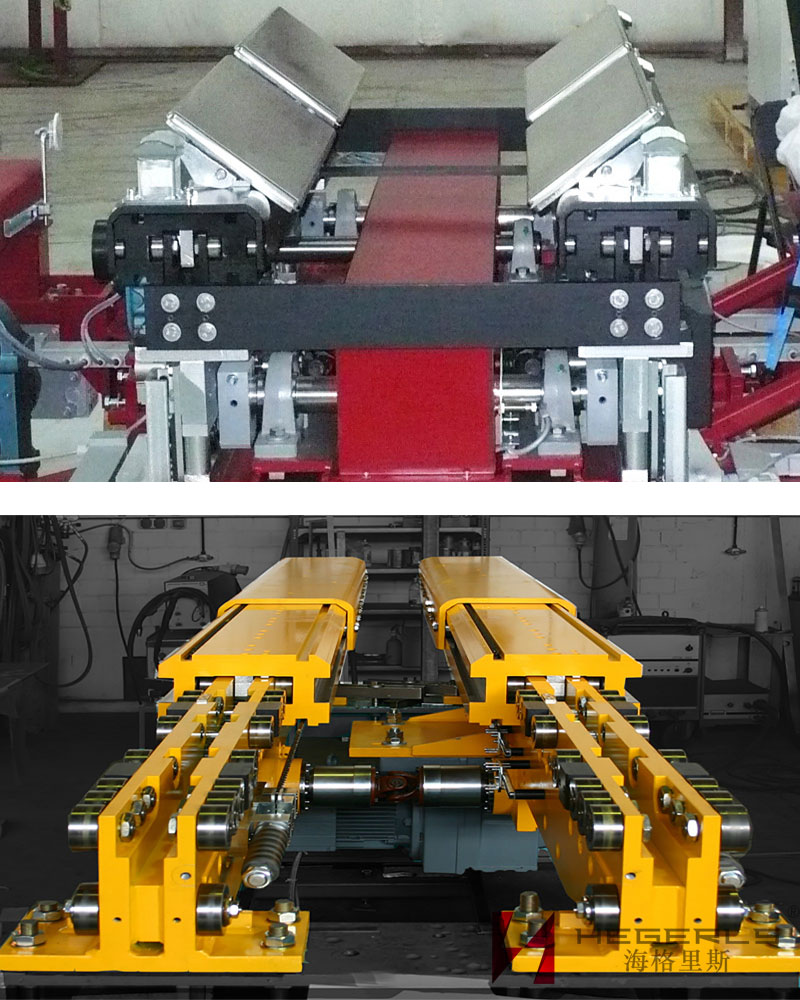
ដៃសមរបស់ HEGERLS ក្តាប់ដៃគឺឈរចំហៀង និងភ្ជាប់នៅពេលក្រោយដោយផ្លូវដែកណែនាំ។ តាមរយៈការគ្រប់គ្រង ផ្លូវដែកមគ្គុទ្ទេសក៍អាចរុញទៅក្រោយដើម្បីកែតម្រូវចម្ងាយរវាងដៃសមទាំងពីរ ដើម្បីសម្រេចបាននូវការប្រើប្រាស់ទូទៅនៃសមសម្រាប់ប្រអប់សម្ភារៈជាក់លាក់ជាច្រើន! ពេលរើសយកវត្ថុធាតុ សមនឹងលាតសន្ធឹងទៅទីតាំងស្តុកសម្ភារៈ ទំពក់រក្សា (ដងថ្លឹង) នឹងបន្ថយដោយស្វ័យប្រវត្តិ និងរារាំងផ្នែកខាងចុងនៃប្រអប់ឬប្រអប់ផ្លាស្ទិច ហើយបន្ទាប់មក សមនឹងដកថយ ដោយអូសប្រអប់កេស ឬប្រអប់ផ្លាស្ទិចទៅកណ្តាល សម ហើយបន្ទាប់មករំកិលចេញបញ្ច្រាសតាមតម្រូវការកម្រិត ទំពក់ (ដងថ្លឹង) ត្រូវបានទាញមកវិញ ហើយសមនឹងដកម្តងទៀត ដើម្បីបញ្ចប់ភារកិច្ចនៃការរើស ឬផ្ទេរ! ថ្វីត្បិតតែគោលការណ៍នៃដងកាំបិតគឺដូចគ្នាទៅនឹងសមនៃកែវពង្រីកធម្មតាក៏ដោយ ក៏ផ្នែកបញ្ជូន កំណាត់តភ្ជាប់ និងធាតុផ្សំផ្សេងទៀតនៃសមម្រាមដៃគឺខុសគ្នាខ្លាំង។ វាត្រូវបានគេប្រើដើម្បីពណ៌នាថា កង់ ខ្សែសង្វាក់ ប្រអប់លេខ រ៉ាកែត ជាដើម ទាំងអស់ត្រូវបានជំនួសដោយកង់សមកាលកម្ម ខ្សែក្រវ៉ាត់ធ្វើសមកាលកម្ម។ ឬវត្ថុធាតុអាលុយមីញ៉ូម ដូច្នេះទម្ងន់នៃដង្កៀបមានទម្ងន់ត្រឹមតែ 80 គីឡូក្រាមប៉ុណ្ណោះ។
លើសពីនេះទៀត វាគួរតែត្រូវបានកត់សម្គាល់ថាក្នុងអំឡុងពេលនៃការរចនានៃប្រភេទ gripper fork telescopic ទំហំនៃ shelves ផ្ទុកក្រាស់, ទីតាំងបញ្ឈរនៃ shelves ជាមួយនឹងប្រអប់, កម្រិតបទនិងទំហំនៃប្រអប់គួរតែត្រូវបានបញ្ចូលគ្នាដើម្បីកំណត់។ ប៉ារ៉ាម៉ែត្ររួមនៃសមផ្នែកបន្ថែម (ចលនាសមផ្នែកបន្ថែម គម្លាតប្រអប់ ទទឹងសម ទទឹងខាងក្នុងសម កម្ពស់សម។ល។) ដើម្បីបំពេញតម្រូវការធុងនៅលើធ្នើ។ ដង្កៀបអាចផ្ទេរ ឬចូលប្រើផលិតផលដែលខ្ចប់ក្នុងកេស ឬប្រអប់ផ្លាស្ទិកយ៉ាងមានប្រសិទ្ធភាព ហើយមិនអាចផ្ទេរវត្ថុមិនទៀងទាត់បានទេ។ លើសពីនេះទៀតបរិមាណនិងទម្ងន់នៃប្រអប់សម្ភារៈដែលបានផ្ទេរមិនគួរធំពេកទេហើយទម្ងន់ផ្ទុកមិនគួរលើសពី 100KG! កម្ពស់នៃការតោងត្រូវបានរចនាជាទូទៅយោងទៅតាមកម្ពស់ធុង!
អំពី HEGERLS Clip នៅលើ Shuttle
រចនាសម្ព័នរបស់ HEGERLS clip នៅលើ shuttle រួមមាន shuttle frame, shuttle chassis, យន្តការធ្វើដំណើរ, យន្តការបន្ថែម fork បន្ទាប់បន្សំ, collector, bearing plate និង bearing platform។ រចនាសម្ព័ន្ធមានដូចខាងក្រោម៖
ស៊ុម shuttle ណាមួយជាធម្មតាជាបែហោងធ្មែញបិទដែលផ្សំឡើងនៃដង្កៀបតួសំខាន់នៅលើភាគីទាំងសងខាងសែលនិងតង្កៀបមជ្ឈមណ្ឌលខាងក្នុងហើយត្រូវបានរៀបចំរៀងគ្នានៅចុងទាំងពីរនៃតួ shuttle; សែលត្រូវបានផ្តល់ជូនជាមួយនឹងគម្របខាងលើដែលអាចបើក និងបិទតាមរយៈ hinge ទ្វារវេនមួយ; រនាំងខ្សែបន្ទះមួយត្រូវបានរៀបចំនៅពីលើតង្កៀប hub; យន្តការធ្វើដំណើររួមមានកង់បើកបរ កង់អកម្ម ម៉ូទ័រ DC brushless ប្រដាប់កាត់បន្ថយ និងអ័ក្សតភ្ជាប់។ ទាំងសងខាងនៃស៊ុម shuttle នៅចុងម្ខាងនៃតួ shuttle ត្រូវបានផ្តល់ជាមួយនឹងកង់បើកបរដែលតភ្ជាប់ដោយ shafts តភ្ជាប់ ហើយភាគីទាំងសងខាងនៃ shuttle frame នៅចុងម្ខាងទៀតនៃ shuttle chassis ត្រូវបានផ្តល់ជាមួយនឹង passive wheels ដែលតភ្ជាប់ដោយ shafts តភ្ជាប់។ ម៉ូទ័រ DC brushless សហការជាមួយឧបករណ៍កាត់បន្ថយដើម្បីជំរុញកង់បើកបរនិងជំរុញកង់អកម្ម; អ័ក្សតភ្ជាប់ត្រូវបានផ្តល់ជូនជាមួយនឹងឧបករណ៍បំលែងមេដែក ដែលតាមរយៈនោះ ទីតាំងចាប់ផ្តើម និងបញ្ឈប់នៃ shuttle នៅលើផ្លូវត្រង់ត្រូវបានទទួល។ យន្តការផ្នែកបន្ថែម fork ទីពីរត្រូវបានរៀបចំដោយស៊ីមេទ្រីនៅផ្នែកខាងក្នុងនៃស៊ុមរថយន្ត shuttle; តួរថយន្តរវាងយន្តការផ្នែកបន្ថែមសមបន្ទាប់បន្សំត្រូវបានផ្តល់ជូនជាមួយនឹងវេទិការសម្រាប់ដាក់កន្ត្រកទំនិញ។ បែហោងធ្មែញបិទជិតនៃស៊ុមរថយន្ត shuttle គឺត្រូវបានផ្តល់រៀងគ្នាជាមួយនឹងចាន bearing ដែលនៅលើចានបើកបរ, បន្ទះត្រួតពិនិត្យសំខាន់នៃយន្តការធ្វើដំណើរនិងចានត្រួតពិនិត្យសំខាន់នៃយន្តការផ្នែកបន្ថែម fork ត្រូវបានរៀបចំជាបន្តបន្ទាប់; ផ្លាកលេខបើកបរជំរុញយន្តការធ្វើដំណើរ ដើម្បីជំរុញឱ្យយានជំនិះរត់លើផ្លូវត្រង់។ បន្ទះត្រួតពិនិត្យសំខាន់នៃយន្តការធ្វើដំណើរគ្រប់គ្រងប៉ារ៉ាម៉ែត្រដែលកំពុងដំណើរការ និងចាប់ផ្តើមទីតាំងឈប់របស់យាន ហើយបន្ទះត្រួតពិនិត្យសំខាន់នៃយន្តការផ្នែកបន្ថែមសម គ្រប់គ្រងយន្តការផ្នែកបន្ថែមសមបន្ទាប់បន្សំដើម្បីចាប់យក និងដាក់កន្ត្រកនៅលើធ្នើ។ ឧបករណ៍ប្រមូលត្រូវបានកំណត់នៅចន្លោះរថយន្តដឹកអ្នកដំណើរ និងផ្លូវត្រង់ ដែលភ្ជាប់ជាមួយខ្សែភ្លើងដែលបានរៀបចំនៅខាងក្នុងផ្លូវត្រង់ ហើយប្រើសម្រាប់ផ្គត់ផ្គង់ថាមពលសម្រាប់រថយន្តដឹកជញ្ជូន។ លក្ខណៈរចនាសម្ព័ន្ធនៃឃ្លីបនៅលើយានជំនិះឆ្លាតវៃសម្រាប់ការផ្ទុកក៏ស្ថិតនៅក្នុងចង្អូរដែលត្រូវបានកំណត់នៅទីតាំងដែលកង់បើកបរ និងកង់អកម្មទាក់ទងគ្នាទៅនឹងអ័ក្សតភ្ជាប់ ហើយចិញ្ចៀនរក្សាភាពយឺតត្រូវបានកំណត់នៅក្នុងចង្អូរដើម្បីបង្កើតជាអ័ក្ស។ ទីតាំងនៃកង់បើកបរ និងកង់អកម្ម។ កង់មគ្គុទ្ទេសក៍ទ្វេត្រូវបានកំណត់រៀងៗខ្លួននៅផ្នែកម្ខាងនៃតួរថយន្តក្រោមកង់បើកបរ និងកង់អកម្ម ហើយនៅចន្លោះផ្លូវត្រង់ និងតួរថយន្ត។ កង់មគ្គុទ្ទេសក៍ទ្វេបង្កើតជាដែនកំណត់ខាងឆ្វេង និងស្តាំ នៅពេលដែលកង់បើកបរ និងកង់អកម្មកំពុងដំណើរការលើផ្លូវត្រង់។ យន្តការផ្នែកបន្ថែម fork ទីពីររួមមាន: ចានរុញផ្នែកបន្ថែម fork កម្រិតទីមួយ ចានផ្នែកបន្ថែម fork កម្រិតទីពីរ យន្តការរ៉កធ្វើសមកាលកម្មកម្រិតទីពីរ យន្តការដ្រាយផ្នែកបន្ថែម fork កម្រិតទីពីរ ម៉ូទ័រដ្រាយផ្នែកបន្ថែម fork ឧបករណ៍កាត់បន្ថយមួយផ្សេងទៀត និងអ័ក្សដ្រាយ។ ; ផ្នែកខាងក្រៅនៃតង្កៀប hub នៃស៊ុមរថយន្ត shuttle ត្រូវបានផ្តល់ជាមួយនឹងបន្ទះជំរុញផ្នែកបន្ថែម fork ដំណាក់កាលដំបូង; ចង្កឹះរាងអក្សរ U ត្រូវបានរៀបចំនៅចំកណ្តាលនៃបន្ទះរុញរាងអក្សរ U ដំណាក់កាលទីមួយ ហើយរ៉ករាងអក្សរ U ជាច្រើនត្រូវបានរៀបចំនៅចន្លោះពេលស្មើគ្នានៅក្នុងកំណាត់រាងអក្សរ U ។ ចានសមបន្ទាប់បន្សំត្រូវបានរៀបចំនៅខាងក្រៅកំណាត់រាងអក្សរ U; បន្ទះសមបន្ទាប់បន្សំត្រូវបានភ្ជាប់ជាមួយរ៉ករាងអក្សរ U ជាច្រើនតាមរយៈប៊ូឡុង និងគ្រាប់។ ចុងខាងលើនៃបន្ទះផ្នែកបន្ថែម fork ដំណាក់កាលទី 2 ត្រូវបានផ្តល់រៀងៗខ្លួនជាមួយនឹង shift fork, DC planetary reducer motor និង photoelectric sensor ពីខាងក្រៅទៅខាងក្នុង។ ឧបករណ៍ចាប់សញ្ញា photoelectric ត្រូវបានប្រើដើម្បីទទួលបានសញ្ញាទីតាំងនៃ fork និងបញ្ជូនវាទៅក្រុមប្រឹក្សាភិបាលសំខាន់នៃយន្តការផ្នែកបន្ថែម fork ដែលគ្រប់គ្រងម៉ូទ័រ DC planetary reducer ដើម្បីជំរុញ fork ផ្លាស់ទីផ្ដេកឬបញ្ឈរ; យន្តការរ៉កដែលធ្វើសមកាលកម្មបន្ទាប់បន្សំត្រូវបានរៀបចំរៀងៗខ្លួននៅលើបន្ទះរុញច្រានបឋម និងដោយផ្ទាល់នៅខាងក្រោម និងខាងលើកំណាត់រាងអក្សរ U ។ យន្តការរ៉កធ្វើសមកាលកម្មបន្ទាប់បន្សំត្រូវបានភ្ជាប់ជាមួយនឹងបន្ទះចុចខ្សែក្រវ៉ាត់សមកាលកម្មនៅលើចានផ្នែកបន្ថែមសមបន្ទាប់បន្សំ; ម៉ូទ័រដ្រាយផ្នែកបន្ថែម fork និងឧបករណ៍កាត់បន្ថយមួយទៀតជំរុញយន្តការដ្រាយផ្នែកបន្ថែម fork ទីពីរដើម្បីផ្លាស់ទី ហើយជំរុញយន្តការដ្រាយផ្នែកបន្ថែម fork ទីពីរនៅម្ខាងទៀតដើម្បីផ្លាស់ទីតាមអ័ក្សដ្រាយ ដូច្នេះចានរុញផ្នែកបន្ថែម fork បឋមផ្លាស់ទី និងជំរុញទីពីរ។ យន្តការរ៉កធ្វើសមកាលកម្មដើម្បីផ្លាស់ទី ដូច្នេះជំរុញឱ្យបន្ទះផ្នែកបន្ថែមសមបន្ទាប់បន្សំត្រូវផ្លាស់ទី។ យន្តការបញ្ជូនបន្ត fork ពីរដំណាក់កាលរួមមានឧបករណ៍បំលែងម៉ាញេទិក រ៉កខ្សែក្រវាត់ synchronous I, ខ្សែក្រវ៉ាត់ synchronous I, ឧបករណ៍កង់តានតឹង និង rack មួយ។ រ៉កខ្សែក្រវាត់កំណត់ពេលវេលា 1 និងខ្សែក្រវ៉ាត់កំណត់ពេលវេលា 1 ត្រូវបានរៀបចំនៅខាងក្រោមចានរុញសមសម្រាប់ដំណាក់កាលទី 1 ។ ម្ខាងនៃរ៉កខ្សែក្រវាត់ synchronous belt I ត្រូវបានភ្ជាប់ជាមួយ shaft បញ្ជូន ហើយផ្នែកម្ខាងទៀតត្រូវបានភ្ជាប់ជាមួយនឹង output shaft នៃ reducer ផ្សេងទៀតតាមរយៈ keyway ។ ឧបករណ៍កង់តានតឹងត្រូវបានកំណត់រៀងៗខ្លួននៅលើផ្នែកទាំងសងខាងនៃប្រដាប់កាត់បន្ថយផ្សេងទៀតសម្រាប់ការជួសជុលជំនួយនៃរ៉កខ្សែក្រវ៉ាត់ស៊ីក្លូ I និងខ្សែក្រវ៉ាត់ស៊ីក្លូ I; រ៉ាកែតមួយត្រូវបានរៀបចំរវាងចានរុញច្រាន fork ដំណាក់កាលទី 1 និងខ្សែក្រវ៉ាត់ synchronous; ម៉ូទ័រដ្រាយផ្នែកបន្ថែម fork និងឧបករណ៍កាត់បន្ថយមួយទៀតជំរុញរ៉កខ្សែក្រវាត់ synchronous belt I និង synchronous belt I to rotate ហើយជំរុញឱ្យ synchronous belt pulley II និង synchronous belt II នៅផ្នែកម្ខាងទៀតដើម្បីបង្វិលតាមអ័ក្សបញ្ជូន។ ក្នុងពេលជាមួយគ្នានោះ រ៉ាកែតទាំងសងខាងជំរុញចានរុញផ្នែកបន្ថែមសមបឋមដែលត្រូវគ្នា ដើម្បីសម្រេចបានផ្នែកបន្ថែមសមបឋម។ នៅពេលដែលយន្តការរ៉កខ្សែក្រវាត់សមកាលកម្មបន្ទាប់បន្សំផ្លាស់ទីស្របគ្នា ហើយជំរុញឱ្យបន្ទះផ្នែកបន្ថែមសមបន្ទាប់បន្សំផ្លាស់ទី រ៉ករាងអក្សរ U វិលនៅក្នុងកំណាត់រាងអក្សរ U ធ្វើឱ្យបន្ទះផ្នែកបន្ថែមសមបន្ទាប់បន្សំដឹងពីផ្នែកបន្ថែមសមបន្ទាប់បន្សំ។ ឧបករណ៍សម្រាប់កង់ភាពតានតឹងរួមមានៈ ប៊ូឡុង តង្កៀបលៃតម្រូវ គ្រាប់ទ្វេ និងកង់តឹង។ កង់ដែលមានភាពតានតឹងត្រូវបានរៀបចំនៅខាងក្រោមខ្សែក្រវ៉ាត់ I និងនៅលើផ្នែកទាំងពីរនៃឧបករណ៍កាត់បន្ថយផ្សេងទៀត ហើយត្រូវបានជួសជុលនៅលើដង្កៀបតួសំខាន់តាមរយៈគ្រាប់ទ្វេ។ តង្កៀបលៃតម្រូវត្រូវបានរៀបចំនៅក្រោមគ្រាប់ទ្វេតាមរយៈប៊ូឡុង ហើយទីតាំងនៃតង្កៀបលៃតម្រូវត្រូវបានលៃតម្រូវដោយប៊ូឡុង ដូច្នេះតង្កៀបលៃតម្រូវជំរុញឱ្យគ្រាប់ទ្វេរឡើងលើចុះក្រោម ដូច្នេះខ្សែក្រវ៉ាត់ដែលធ្វើសមកាលកម្មដែលខ្ញុំអាចរក្សាបាន ស្ថានភាពភាពតានតឹងនៅក្រោមសកម្មភាពនៃកង់ភាពតានតឹង។
តើរថយន្តក្រុងដឹកអ្នកដំណើរ HEGERLS នឹងផ្តល់អត្ថប្រយោជន៍ដល់សហគ្រាសយ៉ាងដូចម្តេច?
ទីមួយ យន្តការធ្វើដំណើរ យន្តការពង្រីកសម និងស៊ុម ខ្សែទំនាក់ទំនងរអិល និងឧបករណ៍ប្រមូលថាមពលរបស់រថយន្តដឹកជញ្ជូនឆ្លាតវៃ HEGERLS ដែលមានឈុតនៅលើកន្លែងផ្ទុក ត្រូវបានរៀបចំដោយសមហេតុផល ដែលធ្វើឲ្យការប្រើប្រាស់ពេញលេញនៃទំហំរថយន្តដឹកជញ្ជូន ហើយអាចសម្របទៅនឹង ការផ្ទុកដោយស្វ័យប្រវត្តិ និងការទៅយកទំនិញនៃលក្ខណៈជាក់លាក់ និងទីតាំងផ្សេងៗគ្នានៅក្នុងឃ្លាំងបីវិមាត្រ ពង្រីកការគ្របដណ្តប់កម្មវិធីនៃរថយន្តដឹកជញ្ជូន និងបំពេញនូវសកម្មភាពជាបន្តបន្ទាប់នៃរថយន្ត shuttle យ៉ាងឆាប់រហ័ស និងប្រកបដោយប្រសិទ្ធភាព ដូចជាការដើរ ការបន្ថែមសម ការជ្រើសរើស ឡើង និងដាក់ទំនិញ វាដឹងពីការផ្ទុកទំនិញយ៉ាងឆាប់រហ័ស និងត្រឹមត្រូវ ដូច្នេះការកែលម្អយ៉ាងខ្លាំងនូវប្រសិទ្ធភាពប្រតិបត្តិការ និងកម្រិតបច្ចេកវិទ្យាស្វ័យប្រវត្តិកម្មនៃឃ្លាំងស្វ័យប្រវត្តិ និងកាត់បន្ថយការចំណាយលើការវិនិយោគរបស់សហគ្រាស។ ក្នុងពេលជាមួយគ្នានេះ វាមានលក្ខណៈសាមញ្ញ និងស្រាលក្នុងរចនាសម្ព័ន្ធ ភាពជឿជាក់ខ្ពស់ និងងាយស្រួលក្នុងការថែទាំ។ វាអាចជំនួសកន្លែងដាក់ជង់លើផ្លូវប្រពៃណី ដោយដឹងពីភាពបត់បែននៃប្រព័ន្ធ និងអនុលោមតាមនិន្នាការអភិវឌ្ឍន៍នៃភស្តុភារអេឡិចត្រូនិច និងស្វ័យប្រវត្តិកម្មនៃឃ្លាំង។
ទីពីរ នៅក្នុងយន្តការធ្វើដំណើររបស់រថយន្តដឹកជញ្ជូនឆ្លាតវៃ HEGERLS អ័ក្សតភ្ជាប់នៃកង់បើកបរ និងកង់អកម្មត្រូវបានផ្តល់ជាមួយនឹងចង្អូរ ហើយផ្នែកតភ្ជាប់នៃសត្វខ្លាឃ្មុំត្រូវបានតភ្ជាប់ដោយប្រភេទថ្មីនៃក្រវិលរក្សាភាពយឺត ដោយដឹងពីប្រសិទ្ធភាពនៃទីតាំងអ័ក្សនៃការតភ្ជាប់។ អ័ក្ស; ដោយប្រើចិញ្ចៀនរក្សាភាពយឺត ដើម្បីសម្រេចបាននូវប្រសិទ្ធភាពទីតាំងអ័ក្ស ប្រសិទ្ធភាពផលិតកម្មអាចត្រូវបានកើនឡើង ហើយការចំណាយអាចត្រូវបានរក្សាទុក។
ទីបី៖ រថយន្តដឹកជញ្ជូនឆ្លាតវៃ Higelis HEGERLS សម្រាប់ផ្ទុកផ្ទុក ដឹងថាកង់បើកបរ និងកង់អកម្មតែងតែផ្លាស់ទីលើផ្លូវត្រង់ដោយមិនងាកចេញពីផ្លូវឆ្លងកាត់តាមរចនាសម្ព័ន្ធកង់ពីរ។ រចនាសម្ព័ន្ធទីតាំងនេះមានស្ថេរភាព និងអាចទុកចិត្តបានជាង។
ទីបួន រចនាសម្ព័ន្ធផ្នែកបន្ថែមសមបន្ទាប់បន្សំដែលត្រូវបានអនុម័តដោយរថយន្តដឹកជញ្ជូនឆ្លាតវៃ HEGERLS អាចធ្វើឱ្យចម្ងាយផ្នែកបន្ថែមរបស់សមកាន់តែឆ្ងាយ និងទទួលបានកន្ត្រកកាន់តែច្រើននៅទីតាំងផ្សេងៗគ្នា។ ក្នុងពេលជាមួយគ្នានេះគោលការណ៍នៃយន្តការផ្នែកបន្ថែម fork ទីពីរគឺសាមញ្ញហើយតម្លៃនៃការរចនានិងការផលិតគឺទាប។ ផ្នែកបញ្ជូនបន្តប្រកាន់យករបៀបនៃម៉ូទ័រតែមួយ + ឧបករណ៍កាត់បន្ថយ + អ័ក្សបញ្ជូន ដើម្បីធ្វើឱ្យយន្តការផ្នែកបន្ថែមសមបន្ទាប់បន្សំឈានដល់គោលបំណងនៃការពង្រីក និងការបង្រួមសមកាលកម្ម ដែលជួយសន្សំសំចៃការចំណាយកាន់តែច្រើន កាត់បន្ថយទំហំប្លង់ដែលត្រូវការយ៉ាងមានប្រសិទ្ធភាព និងកាត់បន្ថយទម្ងន់នៃរថយន្តដឹកជញ្ជូន។ .
ទី៥ រថយន្តដឹកជញ្ជូនឆ្លាតវៃ Higelis HEGERLS ប្រើប្រាស់ឧបករណ៍កង់តឹងប្រភេទថ្មី ដែលអាចរក្សាខ្សែក្រវាត់ synchronous ភាពតានតឹងបានយ៉ាងឆាប់រហ័ស និងដឹងពីការងារធម្មតារបស់រថយន្ត shuttle ។ ជាងនេះទៅទៀត ឧបករណ៍កង់តានតឹងនេះមានលក្ខណៈសាមញ្ញក្នុងការផលិត ងាយស្រួលតំឡើង និងអាចកែតម្រូវបានយ៉ាងឆាប់រហ័ស ដែលជួយសន្សំសំចៃថ្លៃដើម សន្សំសំចៃទំហំ និងបង្កើនប្រសិទ្ធភាពការងារ។
ពេលវេលាបង្ហោះ៖ ថ្ងៃទី ១៩ ខែ ធ្នូ ឆ្នាំ ២០២២